Some time ago I mentioned Geomorphons, a machine vision based approach to topographic analysis promoted by Stepinski and Jasiewicz.
If you don't know what a geomorphon is, here's a link to the
Space Informatics Lab at University of Cinncinati, see also the papers:
Stepinski+Jasiewicz 2011,
Jasiewicz + Stepinski 2013 At the time I first came across this I had some trouble getting GRASS7 to install and get the extension working in Linux so I tried running GRASS7 in windows inside a VM but it didn't really work well.
Now however I have a working GRASS7 installation on Linux and here's a few demonstration maps, which show the broad categories of landscape position. Geomorphons use a line of sight approach best explained by the links and papers above.
I have used a search distance of L = 1000m in these maps, using Shuttle Radar Topography Mission data for the British Isles. I've set a threshold for flatness as 0.2 degrees, which is probably too small because in flat areas I'm not confident of the reality of these interpretations.
Geomorphons have a different kind of scale-dependence than the usual differential geometry based approaches used, though it is not independent of scale, it is more so than a simple slope analysis.
Co-ordinates are OSGB all-numeric throughout.
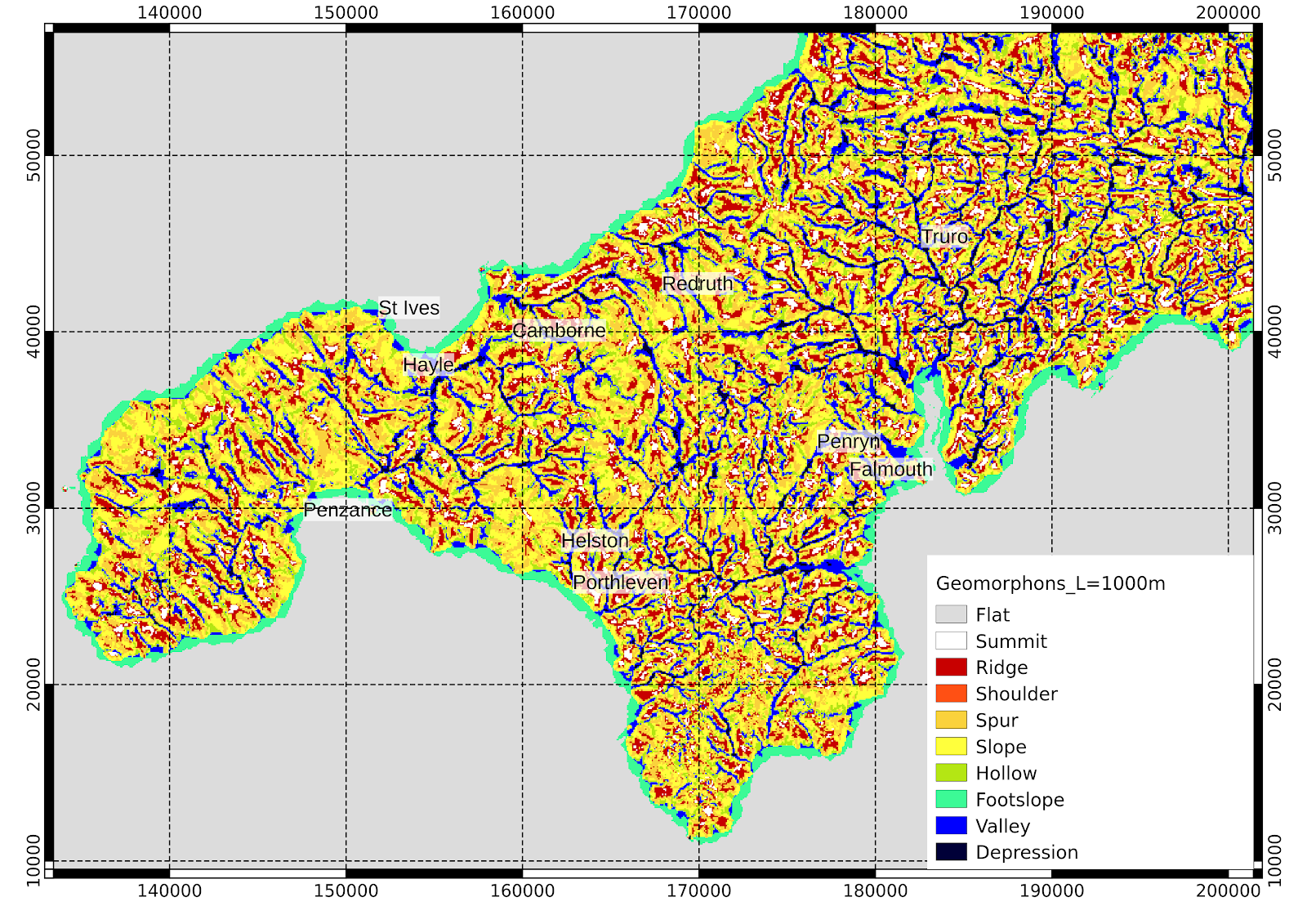 |
| West Cornwall |
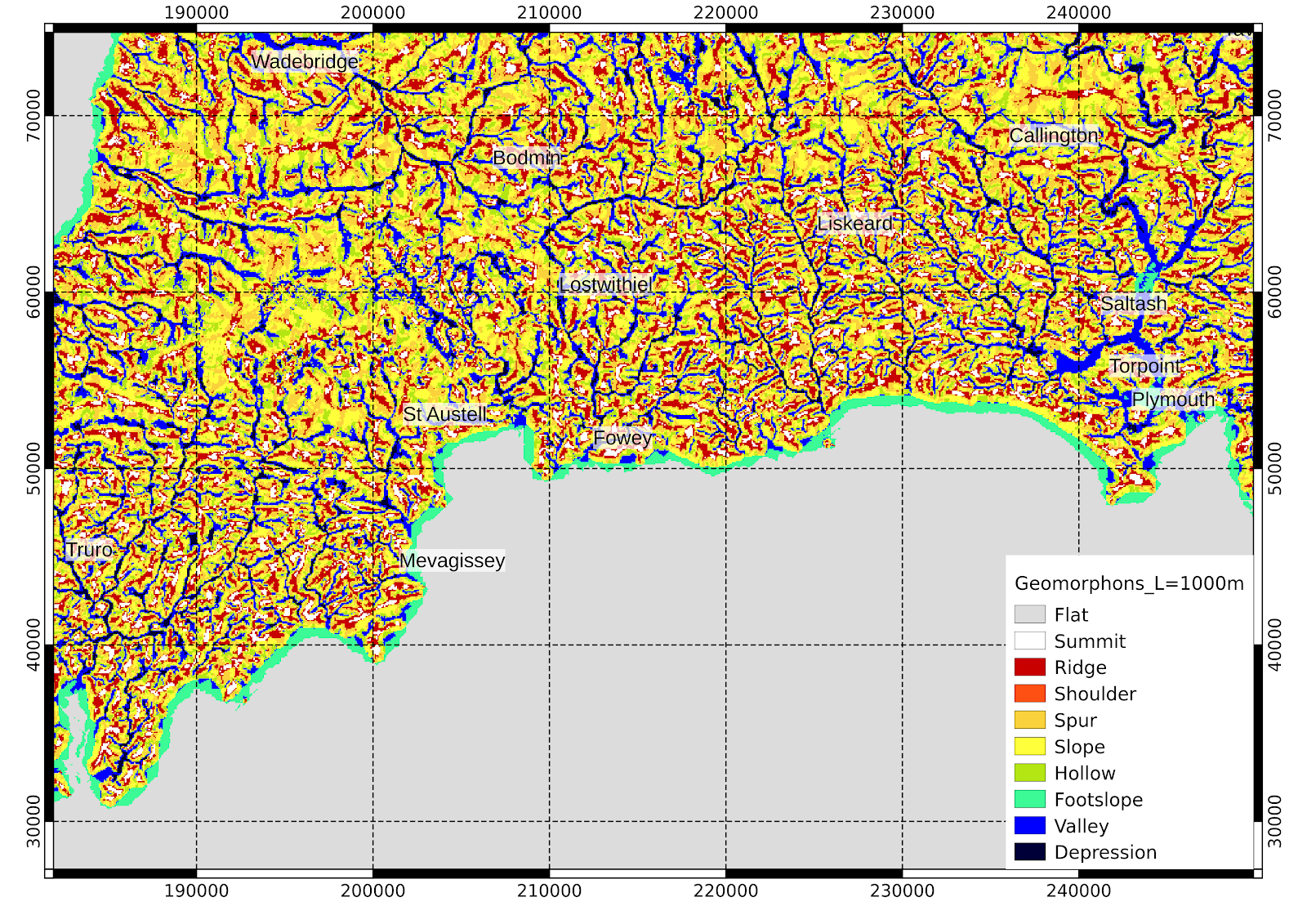 |
| SE Cornwall |
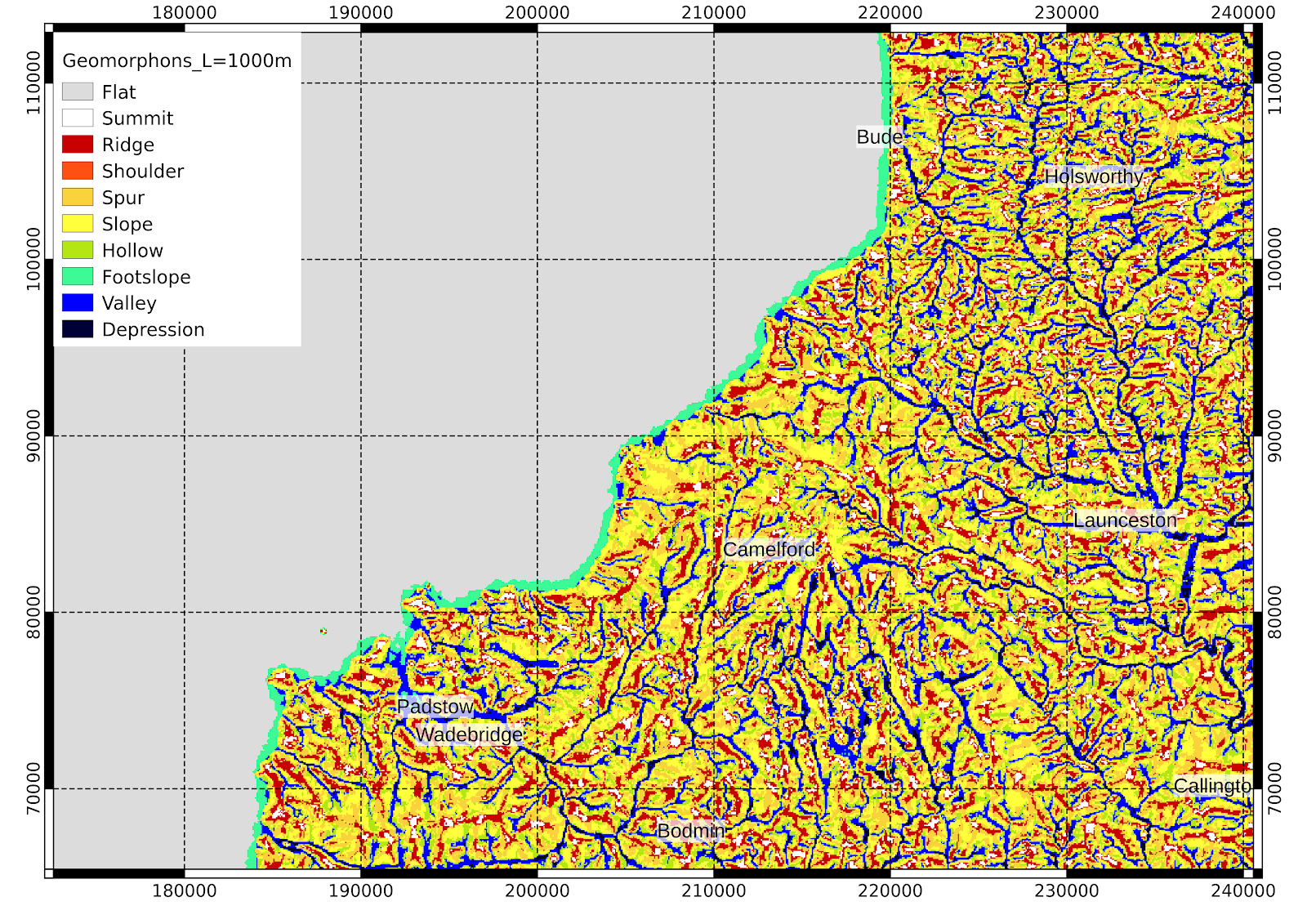 |
| N Cornwall |
 | | | | | | | | | |
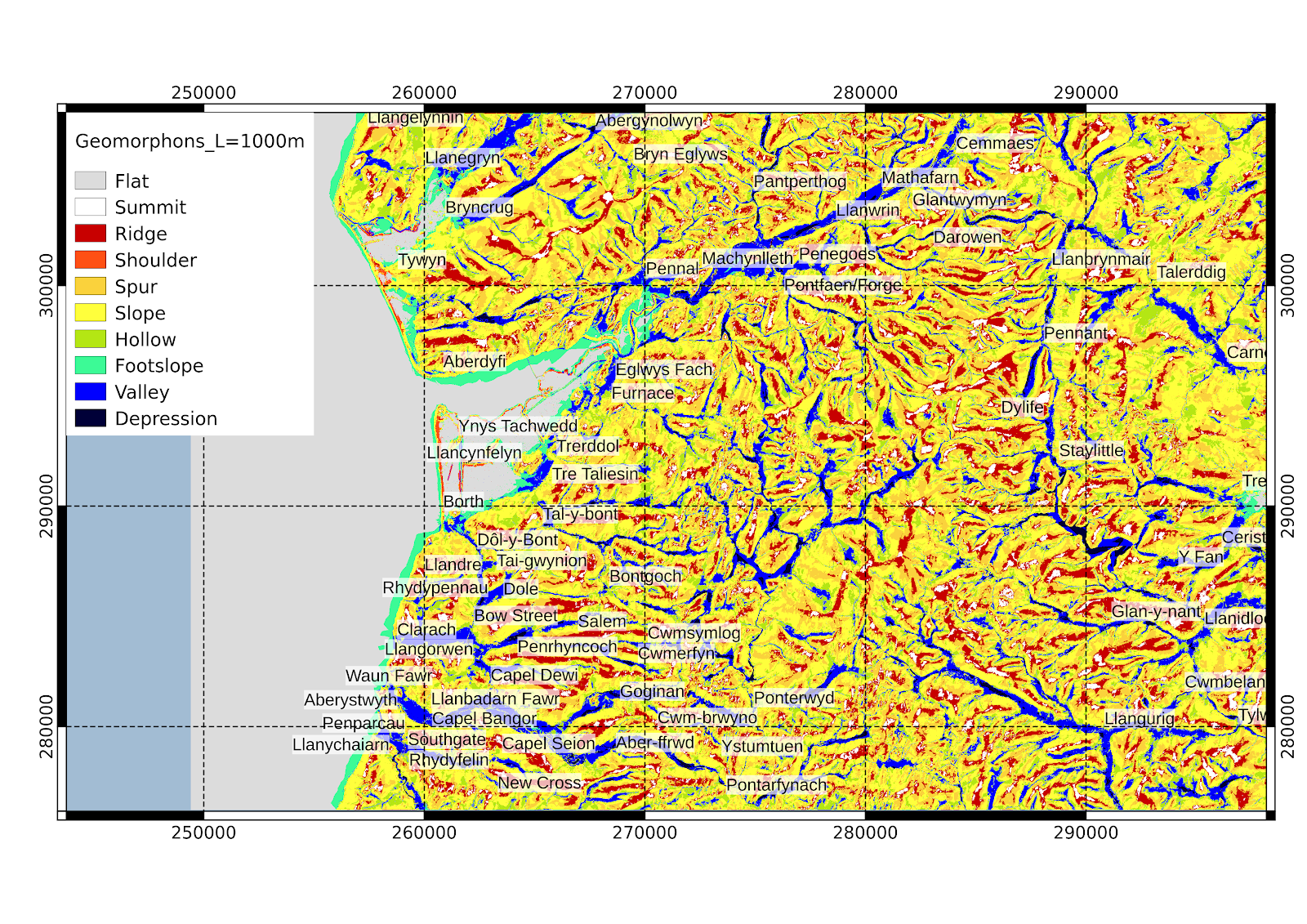
| Aberystwyth area in mid-Wales |
|
 |
| Mid-wales the same as above but with flatness threshold of 1 degree |
Changing the threshold for flatness to 1.0 degrees, flat areas such as Borth Bog are shown as such on the map.
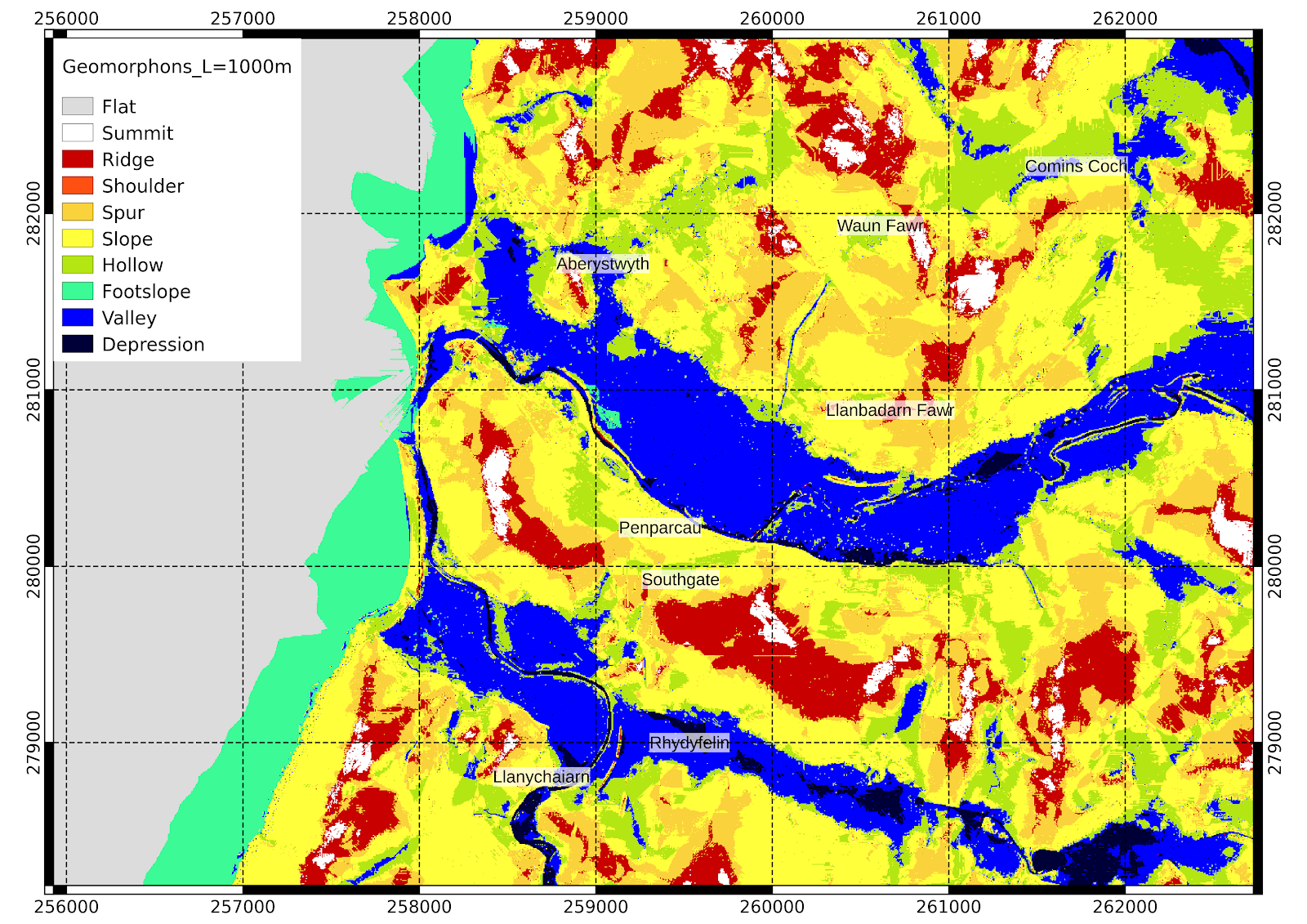
A closeup with 5m data:
Nevertheless I keep search distance L=1000m.